这可能是史上最详细的石头 Roborock 石头 扫地机器人评测对于扫地机器人,我的使用经历大概可以追溯到2010年,当然,对于那个年代的又蠢又笨的二货,大概不太适合用“机器人”来称呼它,所以在很长一段时间内,我给这种家用小电器冠名以“会爬的吸尘器”。这种依靠碰撞感应而进行随机清扫的“吸尘器”带来的使用体验其实并不好,在实际使用中,一方面会碰坏家居的桌腿,而且在清扫时常常会有遗漏区域。 幸好,最近一两年,扫地机器人的技术开始有了质的变化,更智能的规划型开始大量上市,视觉导航系统、激光定位系统开始成为主导,各种传感器、AI智能的加入,也让扫地机器人开始变得更加聪明。 开箱及外观展示这台石头扫地机器人来自于小米科技生态链公司——石头科技,米家扫地机器人就出自于这家公司之手,除石头扫地机器人外,石头科技还有一个品牌——小瓦扫地机器人。 正因为如此,所以这台石头扫地机器人的外包装设计透露出浓浓的小米风格。
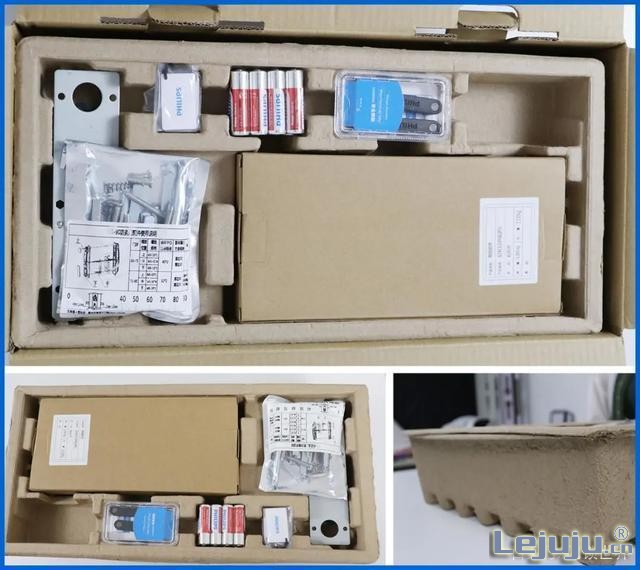
产品型号S50,主机净重3.5KG。
包装盒内,从上而下,分别是说明书,拖把盒,主机,充电座,配件盒。这个包装和小瓦扫地机器人的包装几乎是一抹一样。
白色的机身,做工非常精致,只是颜值虽然在线,但是实在是不经脏啊,扫地机器人每天在桌子下沙发下床底下爬来爬去,白色的外壳很容易就被弄脏。 主机侧面是一个硕大的出风口,在对称的位置还有一个喇叭,用于语音提示的发声。
石头扫地机器人配备了LDS激光测距传感器,这个传感器能以5×360度/秒的速度扫描房间,获取距离信息后通过SLAM算法,实时构建房间地图,规划先沿边后Z字形的清扫路径。而且还新配备了全向压力传感器,可以全方面感应轻微碰撞,防止机器人上方碰撞卡住。 机器顶部的这个橘红色“瞭望台”就是LDS激光测距传感器。
机器正面有一个回充感应器,可以迅速锁定充电底座位置,然后自己乖乖的爬回去充电。
采用ST意法半导体激光TOF测距模块的沿墙传感器,据称,这个传感器可以实现毫米级精准测距,从而实现机器人在清扫墙边时和墙保持合适的距离。包围着回冲感应器和沿墙传感器的是一个半圆形的碰撞缓冲器。
底部的前半部分分布了四个悬崖传感器,一旦机身悬空便会迅速制动退回,防止掉落损坏。底部的中间位置是机器的主刷,后半部分便是安装拖把水箱的位置。
可单独拆卸的主轮。
底部前半部分的万向轮,万向轮旁边的金属触点就是充电口,金属触点旁边的是悬崖传感器,采用红外测距原理。
可拆卸的边刷。
在使用中,主刷常常会缠绕各种毛发,此时就需要取出主刷来进行清理了,石头扫地机器人附送了一把小勾刀,专门用于清理缠绕的毛发,官方建议,每6-12个月更换一次主刷。
掀起顶盖,里面就是一个集尘盒,在顶盖下面还有WIFI连接指示灯和RESET重置按钮。
藏在这里的就是一把清理毛发的勾刀,另外一端为毛刷设计。
集尘盒容量为480ML,超过了米家扫地机器人的420ML容量。
可清洗滤网,但是滤网清洗后一定要晾晒24小时以上,等到彻底干燥后才可以使用。
随机附带了两块滤网,两块拖布,还有水箱滤芯。官方建议,拖布每30分钟清洗一次,6-12个月更换一次新的拖布,水箱滤芯1-3个月更换一次,以便保证更好的清扫效果。
机器的使用非常简单,按下电源开关开机后,打开米家APP进行连接,连接成功后,即可在APP上查看机器的工作状态和使用情况,同时还能通过小爱同学控制机器的操作。
实际使用体验这是目前在用的三台扫地机器人,最左边是一台非常古老的科沃斯随机清扫型,廉颇老矣,不能再饭了;中间这一台就是石头扫地机器人;右边的是同为石头科技旗下的小瓦扫地机器人规划版。
从这张图可以看出,同出一门的石头和小瓦设计风格非常接近,只是小瓦没有使用石头的LDS激光测距传感器,而是采用了双陀螺仪惯性导航系统融合高精度双光学运动追踪传感器,从工作原理上讲,石头的LDS激光测距传感器工作得更加精准。
两个品牌的充电底座外观一模一样。
但是小瓦扫地机器人的集尘盒为640ML,明显大于石头扫地机器人的480ML。这两款机器都采用了FIP级密封尘盒设计,配合大面积E11等级可水洗滤网,可以做到在工作时过滤脏物的同时吹出洁净空气,杜绝二次污染。
两款机器的拖布和水盒也是一模一样,可以互换。
从侧面看,两款机器的高度基本上是一致的。
但是经过实际测量,因为小瓦扫地机器人的全方向回冲感应器凸出高度比石头扫地机器人的LDS激光测距传感器凸出高度要小一些,所以理论上讲,小瓦可以进入到90MM高度的空间,而石头只能进入100MM高度的空间。 在实际使用中也发现,小瓦能进去的位置,石头不一定能进去。
石头扫地机器人采用的是前扫后拖模式,启动机器后,主机自动扫描生成地图并智能分区,在分区范围内采用先沿墙清扫,之后Z字形填充的方式规划清扫路径,逐一完成各个分区的清扫,这种方式基本上能做到高效有序不容易出现漏扫情况。 也可以启动机器进行局部清扫,机器能在以自身为中心的1.5*1.5米范围内进行工作。 在持续的使用中可以发现,如果家中没有过多的障碍物,石头扫地机器人清扫的洁净度非常高,除非是顽固的污渍,底板上可见的碎屑、毛发、轻微污渍基本上都能清扫得干净。
石头扫地机器人所采用的植物仿生学湿拖系统,在木地板上工作时,可以看到,地板上仅仅只有轻微的水迹,而且很快就被蒸发掉了,这点水迹并不会对木地板有明显的影响。
在清扫完成后,机器人会自动回冲,经过多次测试,石头都能很容易就找到充电座并进行充电,但是有一点需要注意的是,充电座左右两侧和前方需要留出一定的空间。
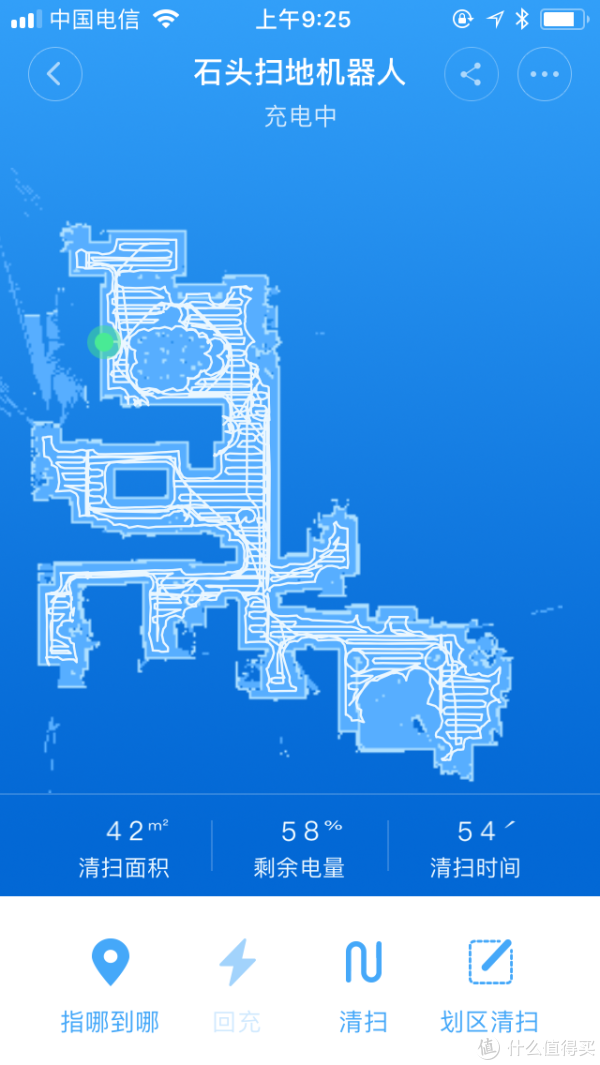
从APP上可以看出石头的清扫轨迹,在没有障碍物的情况下,机器人的行驶路线非常平直,一旦感应到障碍物,机器人就会沿着障碍物绕过去,值得一提的是,这台扫地机器人在同一次清扫中如果感应到障碍物并且成功的绕过后,再一次来到这个障碍物旁边时就会自动绕过,而不会出现第二次碰撞试探。
满电情况下,机器设置为MAX模式,一次完整的清扫,共完成清扫面积42平方米,电量从100%下降到58%,总计清扫时间54分钟,
机器的充电功率为30.77W,对于机器内置的5200MAH大容量电池来说,这个充电功率是完全可以接受的。相对来说,小瓦扫地机器人的2600MAH电池在实际使用中偶尔会出现电量不够用的情况。
石头扫地机器人的吸力高达2000Pa,如此高的大吸力是需要高速运转的风扇才能支撑得起的,而高速运转的风扇随之而来的问题就是大噪音。 那么这台机器人的实际工作噪音到底有多大呢?经过近距离实测,在环境噪音为53.9DB时,机器设置为安静模式时,实测出风口附近噪音为78.6DB。
而机器设置为标准模式时,出风口附近噪音达到了81.9DB。
当将机器设置为强力模式和MAX模式的,出分口附近噪音达到了86.6DB和89.1DB。当然,这个测试的数据是机器出风口处的近距离测试,实际使用中,人耳并不会如此近距离的接触机器。 如果对机器发出的声音比较敏感,建议采用定时清扫模式,选择在外出家中无人时让机器自动工作。
拆解——一探究竟相对于其他家用小电器来说,扫地机器人的工作环境其实是比较恶劣的,在工作中,机器人随时都要和灰尘、碎屑、毛发、杂物打交道,还要随时面对地面上可能出现的各种污渍,尤其是这种扫拖一体机,还随时要带着水箱到处跑。 另外机器人在工作时,伴随而来的是各种震动、碰撞,以及机器自身风机的高转速所造成的共振。 种种复杂的环境,注定了扫地机器人需要经常进行维护和自身的清理,在此之前,曾经拆机维护过多台扫地机器人,对这种产品内部复杂的结构是有较深的体会的。 所以决定拆解这台机器,看看其内部设计到底有什么不同之处。
这台机器其实很好拆解,拆下底板上的几颗螺丝后,就可以轻松取下底板看到内置的电池、主刷组件、行驶轮组件。
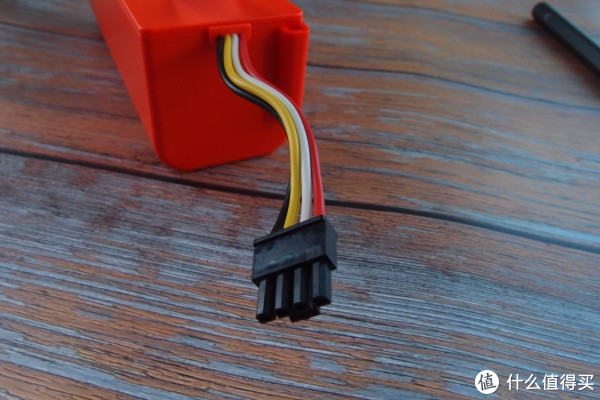
5200MAH的大容量锂离子电池,额定电压14.4V,充电限制电压16.8V,电池的生产厂家为德赛电池有限公司,德赛产品在国内的市场份额还算不错。 电池通过四线接插件连接在机器主板上。
拆下电池后,即可拆下主刷组件,主刷组件包含有一个电机,通过接插件连接在机器主板上。对于一台扫地机器人来说,主刷往往是最容易被毛发缠绕的地方,在工作中,主刷一旦被缠绕卡死,就容易引起电机过热而损坏,因此需要经常清理主刷上缠绕的各种异物,保持主刷干净。
两个行驶轮组,也是通过同样的接插件连接到主板上,每个轮组里面各有一台电机。这种零部件的模块化设计,对于后期的维护和维修来说会很便捷,只需要打开底板,将损坏的部件拆出更换即可。在之前拆过的一些较老款的扫地机器人中,基本没有采用这种模块化的设计,因此维修起来较为困难。
边刷组件,一台较小的直流电机通过减速齿轮盒带动边刷进行工作,按照官方建议,边刷需要至少每一个月清理一次,清理边刷时,可以直接将边刷固定螺丝拆下即可,不需要拆出整个驱动模组,为了保证更好的清扫效果,边刷需要3-6个月更换一次。 对于扫地机器人来说,主刷、边刷、集尘盒滤芯、拖布、水箱过滤组件都是消耗品,在使用过程中需要定期更换。
拆除掉所有的电机驱动模组后,就可以拆下碰撞缓冲器部分了,一块半圆形的保护盖下隐藏了两个碰撞轻触开关,原理很简单,就是通过杠杆原理导通和关闭光信号来识别是否撞击到障碍物。
沿墙传感器已经从夏普的红外测距改成意法半导体的雷射模块。相比于红外测距模块,意法半导体的雷射感器可以实现毫米级精准测距,从而实现机器人在清扫墙边时和墙保持合适的距离。
回充感应器通过识别到充电底座正面发射的远红外回冲信号,即便在超远距离下,也可以精准锁定充电底座。
机器按钮部分的顶盖通过塑料卡子直接卡在中壳上,只需用力一扳即可取下,取下顶盖后,可以看到主板上留有一个micro USB接口,这个接口的功能目前暂时还未知,应该和升级系统有一定关系吧。
LDS激光测距传感器被一个白色保护罩罩住,拆开保护罩后,就可以看到橘黄色的传感器组件。传感器部分通过电机用皮带传动,以5×360°/ 秒的速度扫描房间,获取距离信息后通过SLAM算法,实时构建房间地图,这个传感器里面由主控电路、激光发射管与接收传感器组成,如果不出意外,应该是和米家扫地机器人一样,采用的TI德州仪器TMS320F28026DAS微控制器。 在保护罩下面还有一个全向压力传感器,可以全方面感应轻微碰撞,防止机器人上方碰撞卡住。
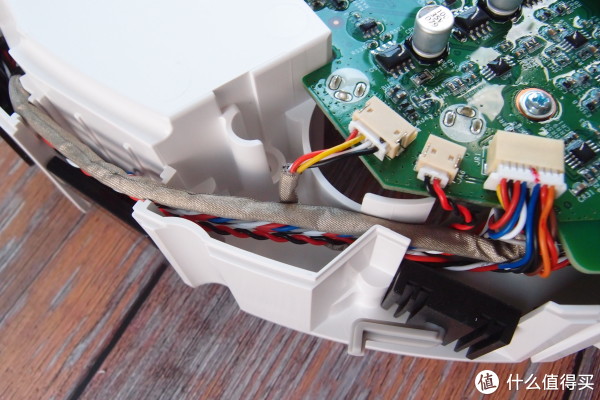
将LDS激光测距传感器拆下后,即可将主机的外壳彻底拆开,内部是一块布满各种接插端口的主机板。
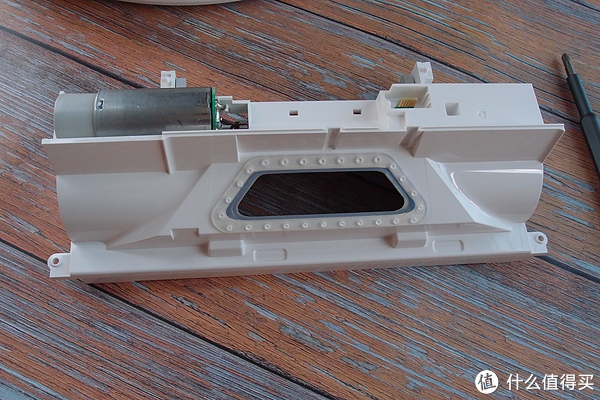
高达2000Pa的大吸力就是由这个涡轮风机产生的,电机的生产厂家为日本NIDEC,风机的出风口再用全贴合密闭消音棉配合特制多孔空气筛用来降噪,风道采用密封设计,以保证吸力不会出现损耗。
和出风口对称排列的喇叭,石头扫地机器人可以通过APP导入个性语音包,目前APP上有多达十种不同风格的语音包,既能卖萌又能撒娇,在家用电器同质化严重的当下,这种个性化设计还是比较有吸引力。
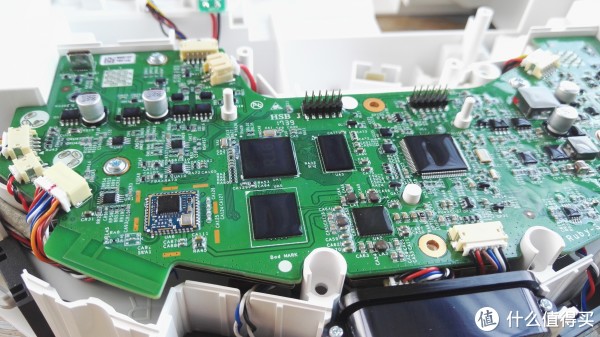
PCB主机板由两层PCB组成,上面一块为按键板,通过接插件连接。
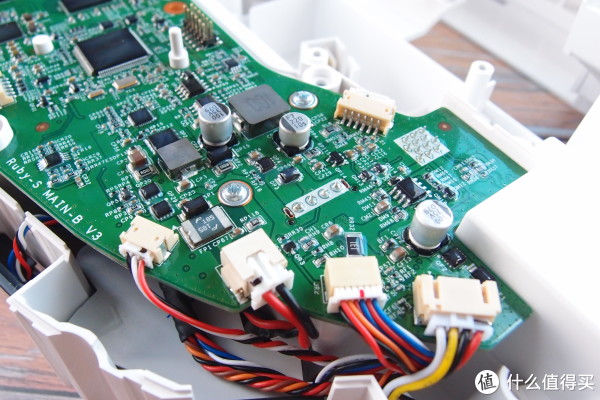
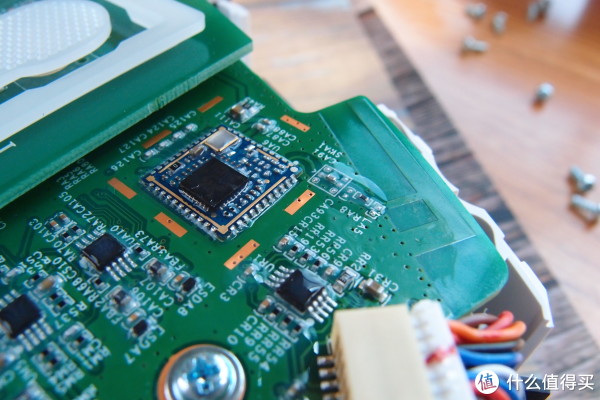
取下按键板后,下面一层就是主机板了。整块PCB上所有的IC和大部分贴片元件均被一层胶水覆盖,这样做的目的,一方面可以有效防水防尘,同时也可以防止工作时的震动对元器件造成的不利影响。
由于所有的IC都被胶水覆盖,所以很难看清IC的具体型号,但是从主板的元件布局来看,和米家扫地机器人的主板很类似,米家扫地机器人采用的处理器是Allwinner ARM Cortex?-A7 架构的四核应用处理器R16,镁光MT41K256M16TW-107/DDR3L SDRAM,AXP223电源系统管理芯片,THGBMDG5D1LBAIL 4 Gbytes e-MMC和RTL8189ETV无线模块,并且还有一块ST意法半导体ARM Cortex-M3架构的微控制器辅助运算,依此推测,石头扫地机器人的主板上应该也是同样使用着这些IC。
拆解全家福。
总结通过对石头扫地机器人的详细使用测试和拆解可以看出,目前扫地机器人行业的发展方向还是在机器如何能清扫得更干净这个问题上,无论是LDS激光测距传感器的加入,还是在提升越障能力和脱困方面做出努力,石头扫地机器人都是在试图将这一点做得更好。 先进的激光测距线路规划功能,扫拖一体功能,植物仿生湿拖系统,个性语音包设计,石头扫地机器人试图在一大波竞品的相同设计中寻找属于自己的不同,很显然,就目前的实际体验来说,石头扫地机器人做得还算不错。 在购买扫地机器人时,消费者的初衷就是解放双手,减轻家务压力,因此在选择时,自然要以好用、方便为最终目的,虽然在实际使用中,石头扫地机器人还是表现出了一些小瑕疵,比如水箱较小无法应对大面积扫拖,比如对于线缆的脱困能力依然有限,但是不管怎么说,目前2499元的价格,石头依然是一款值得入手的扫地机器人产品。 |
















































































































 我也要投稿
我也要投稿









香港服务器多少钱一个月?哪家的香港服务器
4核4g6M50G盘20G防御云服务器价格多少钱?T
特发集团与华为签署全面合作协议
【身边的AI】高空抛物智能追溯解决方案,站
中海&华为签署战略深化合作协议
华为赵博:数字化转型成为地产企业最确定的
这款TCL K6V指纹锁不到千元即可买到?大品
凯迪仕指纹锁哪款好用?买凯迪仕指纹锁选哪
极光尔沃3d打印机怎么样?极光尔沃a6详细介
企业上云对企业有什么帮助?企业上云有哪些