家电启示录 篇一:扫地机器人揭秘:拥有火星车科技的iRobot到底强在哪?米家扫地机器人/iRobot对比评测
前言已经下决心从此以后认真写高质量的文章了,比如这个家电系列,即将装修入住的我准备在这里分享下我对各种家电及最新技术的了解及根据自己的需求提供一些选购经验,并通过自己的测试将我理解的那些黑科技呈现出来(大量动图预警)。 不能再为了几个金币而水了,有时候想皮一下,真心会掉粉哎,看到掉粉总感觉是自己水平太差,我的错……我的错……
小米扫地机器人使用一年,其实各方面使用起来还不错,一周清扫三次,尽职尽责,一开始家人也算满意。确实是个解放双手,减轻家务负担的神器。 但我还是有不太满意的地方,由于家里多了个小宝宝,环境变得更加复杂了,不仅地面空间变小了,地面的杂物也变得非常之多(宝宝现在半岁,各种婴儿用品已经侵占了家里1/4的空间了,而且清时家中一直会有人在了)。 面对现在这样复杂的环境,小米扫地机器人此时就显得并不那么好用了,经常被困住,清扫时间变得非常长,100平的房子清扫面积其实只有40㎡左右,从以前的40分钟不到变成了现在60分钟才能完成任务。 最烦恼的是经常各种意外挂掉,变成了半自动化了,家里长期有人的环境,稍微动下它就容易出错,卡死在各种地方。
效率低以只是其一,实际上还有如下几点 一年的使用过程中总结出的小米扫地机器人的缺点:
从刚开始的赞不绝口四处安利,到现在的有点嫌弃,米家扫地机器人不再适用于各年龄段人口都有地面比较复杂的情况了。
也把一直种草的米家升级版扫拖一体机的石头扫地机器人剔除了购买意向单,同门师兄导航系统也是和米家一脉相传,可能最后也会是个不省心的结果。显而易见的是扫拖一体虽然看着美好,但一台机器要实现两个功能基本是不可能的事情。 主要纠结点在于:清扫过程扫拖同时进行要么尘盒小了,要么储水盒小了,而且大面积清扫抹布多半要换,不可能全房都一块抹布抹干净,清扫过脏区域再来清扫相对干净的区域带着的一块脏抹布会污染所有地面,地毯上也会上去拖,沾湿了地毯更加麻烦,可能并不会比现在的好多少。 本想将就着用米家扫地机器人算了,但是随着家里新房装修快结束了,我还是会需要一款扫地+拖地的机器人,到搬新家的时候宝宝更大玩具更多活动范围更广了,地面情况可能比现在更糟糕。
而我家里的伏地魔也无时不刻不在提醒我地板要扫要擦了。 做为一个合格的奶爸需要给宝宝健康干净的环境,地板上的污渍和过敏原也是需要清除的。 但是……此时的我也已经被扫地机器人宠坏了,再也离不开它了,生命不能浪费在扫地擦地这种事情上面,我必须买一台(扫拖一体)更好更强力更省心的,一台不够那就两台(扫地+拖地) 但市场上的各色扫地机器人琳琅满目,起初并不知道怎么选,除了小米我竟一无所知,而且扫拖一体机器人目前也都没有很完美的解决方案。所以买这台新扫地机器人前还是需要做点功课,至少要知道好在哪里,这里我把自己的选购经验先分享出来给大家参考,希望能帮到大家。 扫地机器人导航系统原理为了找到更合适的扫地机器人,首先还是要看看导航系统工作方式及原理。
随着了解的增多,当年那种无导航随机乱撞式的早已被淘汰了,目前的扫地机器人的导航系统可分为下面三种。 一、激光测距式导航系统(LaserSmart? Mapping and NavigaTIon) Neato扫地机器人是通过激光测距的方法生成室内地图,在此基础上合理地规划清扫路线,而不是试探着撞来撞去,用户直观的感受是,它看起来比较聪明。其实现原理是:它的顶端设置有一个可旋转的激光发射头和配套接收器,通过发射激光扫描自身到边界每个点的距离,从而生成数字地图,还能根据屋内家具位置的变化实时进行更新。 既然大脑中有了室内地图,Neato还可以聪明地记忆存储位置关系,比如当它因电量不足而自动返回充电完毕以后,能自动从上次返回的节点继续开始清扫。
米家扫地机器人,石头,以及目前一大票国产扫地机器人均采用这种导航,确实简单实用,但不够好用。 二、北极星导航系统(NorthStar? NavigaTIon System) 类似于室内GPS定位的方法,北极星导航系统的实现原理是在室内建立一个发射信号的模块,机器人通过测算自身跟该信号的偏移角度来确定自己的位置。由于它不能像Neato一样“看见”室内的物体,所以只能在清扫过程中通过自身去触碰来建立室内地图和物体之间的位置关系。
北极星导航系统是美国EvoluTIon RoboTIcs公司的专利,最早应用于其擦地机器人Mint产品上,2012年9月公司被iRobot收购,随后应用于Braava系列擦地机器人。 确实就只有iRobot的Braava系列在使用。 三、图像式测算导航系统
英国Dyson公司推出的一款扫地机器人360Eye,它利用顶部搭载的3摄像头扫描周围的环境,然后结合红外传感器,利用数学运算和几何、三角法测绘出房间的地图,以此来进行导航,并根据前后影像中各个地标的位置变化来判断当前的移动路线,并对其所构建的环境模型进行更新与调整。 不止戴森,iRobot的高端9系列也采用的这种方式。 激光测距式导航系统实际上只能算作最基础的导航成本低,对空间物体大体上测量下再做规划,细小的地面污渍之类的并不能识别,采用这套系统的基本上是按计划全房走一遍,胜在实用,但是旋转式的扫描易损坏,家里的米家扫地机器人使用一年就已经开始扫描有偏差了,墙体不直。 图像式测算导航系统则更加复杂,识别率更高,甚至可以识别出桌椅板凳,沙发,电视柜,电器,房门等物体。以当前的图像识别技术而言这并不难,也许是在为了更智能的下一步做准备,比如说语音控制扫地机器人“来把沙发前面扫一下”,这是更高级别的智能,但也需要大量的运算做基础,IA加持也是目前最火爆的前沿技术。 二者相较而言就像二维图对比三维图,图像式对激光测距式可以说是不在一个维度上的天壤之别。 而北极星导航系统实际上与激光测距式导航系统差不多,主要靠投射到天花板上的坐标以及碰撞反馈进行导航。不过也是简单有效。 但对图像式测算导航系统种草的同时我也有个疑问:为什么这两大巨头同时选择了图像式测算的导航,按理说激光导航不简单有效得多吗?况且图像的视频采集会受到光线的影响,这岂不是对使用条件上又多了一道限制?新技术到底怎样? 图像式测算导航系统扫地机器人基于对导航系统的分析,我渐渐种草了走在科技前沿的戴森和iRobot。 戴森 360eye首先看的是戴森,戴森没有把这称为扫地机器人,而是称之为吸尘器机器人。  戴森 360eye 吸尘器机器人。  至于为什么先看戴森,我其实算是一个戴森的忠实用户了,所谓一入戴森终身戴森 戴森的吸尘器口碑上绝对是业界翘楚,实际使用上大吸力的效果以及美观的造型确实颠覆了传统吸尘器傻大笨粗的形象,不管是外观还是功能上都是非常的满意。
而戴森的吸尘器机器人我也是种草颇深,想着这也许会是目前最好用的吸尘器机器人了。每每看到戴森360eye的文章都会去种一次草。 眼看着就要下单了,但是一篇评测让我彻底拔了草。 高端扫地机器人 PK: 戴森 360eye 智能水平竟然不敌 iRobot 961! 这篇评测比较专业,还是十分具有信服力的。 结论有下面几点:
毕竟戴森算是扫地机器人战场的新手,难免不敌iRobot这样的大佬也是常情,主要的弃点是路径规划不给力,全靠摄像头,复杂环境难以胜任,况且……各种角落覆盖不到的话一个这样的自动行走的吸尘器并没有减少我的清扫工作量。 我更需要一个清扫更彻底更到位,解放双手减轻家人清扫工作的机器人。这让我把目光转向了行业大哥iRobot。 iRobot于是我开始去了解iRobot。(没有一开始看iRobot的原因主要还是贵  了解过程中让我印象比较深刻的是站内的这篇介绍iRobot的文章,NASA火星车制造商无疑是最大的亮点。 而火星车的工作模式上也差不多与扫地机器人一样:识别地形,行走,探测障碍物并躲避/翻越障碍物,寻找兴趣点(垃圾),针对性的开启工作模式(清扫吸尘)。 我在买小米之前也看到各种评测里嘲笑iRobot那么贵还没小米好,所以一直没去了解iRobot,甚至也在附和着嘲笑买了iRobot的小伙伴是交的“智商税”。
其实看完这篇已经高下立判了,都说小米的米家扫地机器人好,技术先进,但是为什么我国最新研制的玉兔号月球探测车在月球没有撑过设计使用寿命,而好奇号火星车却孜孜不倦的远超设计使用寿命依然稳定工作到现在? 本以为国内的扫地机器人技术已经非常成熟,扫地机器人上的技术壁垒早就破除了,甚至青出于蓝而胜于蓝般的做得比扫地机器人比鼻祖iRobot更好了。但实际上……在我了解了这么多以后……技术壁垒不是一般的厚,导航系统上就差了一个维度,国内甚至到现在没有一家比较好的视觉导航扫地机器人厂商。
要面对的现实是技术的沉淀上我们确实差得很远,差了月球到火星的距离吧。 虽然技术上差别很大,但还是要感谢小米,小米等一众国产厂商直接把曾经高高在上的iRobot价格拉下了神坛,现在的iRobot价格不再那么高高在上,也变得可以接受了。 了解完之后毫无疑问的是iRobot依然稳坐业界第一,无论技术上还是实用性以及使用寿命上都有不错的表现。 选购过程经过上文的一番心路历程…… iRobot的小草在我心里已经不是小草了而是苍天大树,是时候砍树了。(果然了解的越深越会去看贵的买贵的。 型号区别iRobot产品线 Roomba 600系列:支持智能互联的中端产品
Roomba 600系列可以看作是500系列的升级款,在500系列原有功能的基础上进一步优化和升级。代表型号有:Roomba 601、Roomba 650、Roomba 651、Roomba 690、Roomba 691等。Roomba 600系列新增Dirt Detect污垢探测模式,Roomba扫地机器人在打扫较脏的区域时,如果传感器“听到”收集的污垢增多,则会自动切换到 Dirt Detect污垢探测模式,并集中清洁该区域。脱困模式,多组精密传感器有助于引导其对家具和杂物四周进行彻底清洁,同时避免被卡住。Virtual Wall 虚拟墙,可以发出不同形状的隐形的屏障,将Roomba限定在特定区域清扫。
  总体上与5系列差不多,多的是吸入污垢增多的情况下的增加吸力模式,导航系统依然与5系列一致。不过多了 Dirt Detect污垢探测模式,原理上就是随机溜达,发现污垢过去重点清除。 Roomba 800系列:拥有强劲的清扫模式的中高端产品 Roomba 800定位中高端系列,代表型号有:Roomba 861、Roomba 860、Roomba 880、Roomba 881、Roomba 891、Roomba 890。800系列采用了更为高效的进阶版三重高效清洁系统,可以有效提升清洁效能。
与600系列类似,800系列支持App遥控的仅有88X和89X几个型号,这几个型号同时采用了大容量镍氢电池设计,与800系列其他型号相比续航时间可以多出1个小时左右。Roomba 880使用的是无边刷的Aeroforce清扫系统,凭借强大的吸力吸附地上的灰尘,600ML大容量集尘盒可以收集更多灰尘,支持灯塔导航技术,可以让机器人实现挨个房间清扫,功能十分强大。
 突出了吸力的提升以及污垢探测,以及防缠绕,智能程度上有所提升,续航清洁度都不错,但是依然没有我想要的视觉导航系统。 Roomba 900系列:当之无愧的高端系列 Roomba 900是今年最新上市的系列,拥有iRobot最新的多重模式智能切换技术清洁技术,机器人每秒可做出 60多个智能决定来评估清洁,并自动切换清洁模式。900系列支持可视化全景规划,利用iAdapt情景规划智能导航与iRobot专有的vSLAM视觉运算处理技术,在清扫过程中实现连贯、高效地导航。同时在其地图上创建可视化地标便于在清洁时跟踪位置,从而知道哪些区域已经清洁,哪些区域尚未清洁。支持断点续航技术,当电量不足时,Roomba会自动返航充电,充满电后回到之前的位置继续清洁。除此之外,Roomba 900进一步提升了操作的智能性,扫地机器人会在集尘盒已满并需要清空时自动提示,用户可以通过手机app查看集尘盒状态,通过App也可以自行深度定制清扫模式以及吸力,代表型号有Roomba 960和980。
 除了价格,其他方面确实是非常完美的产品,十倍吸力,什么都好就我我不好,钱不够  961的价格已经达到了我心里可以接受的区间,与旗舰款的差别只有吸力上以及续航上的差别,没有地毯的情况下完全够用,十倍吸力是专门为清洁地毯设计的,国内全屋地毯的环境是非常少的,Roomba961确实完全够用。 好了就决定是你了,iRobot Roomba961,静待好价了。 国内
偶然看到大妈上推了八月新出的Roomba 970,相比最高端的Roomba 980吸力小了一些,但对于没有大面积地毯的家庭足足够用了而价格只有一半。买新不买旧,这样的价格还是挺有吸引力的,况且还支持天猫精灵语音控制,电池续航上也是与Roomba 980一样的3300mAh。 Braava 擦地机器人:专注擦地仿人工跪式拖地
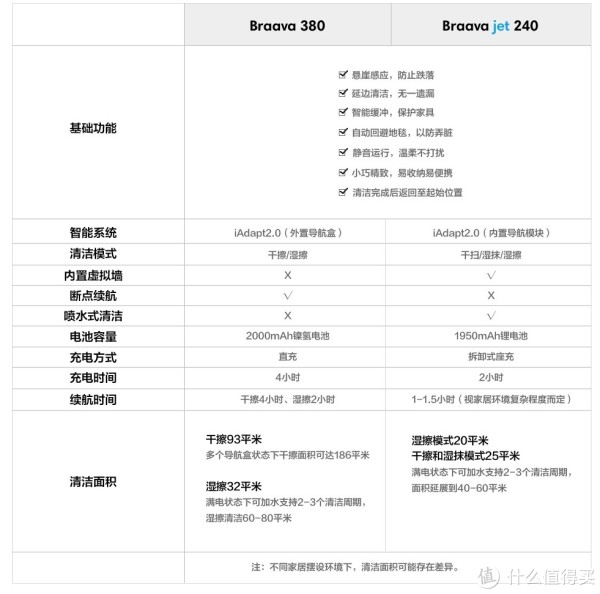
Braava 380适合那些家中经常打扫、以浮尘,污垢为主的家用环境,以每日快速清洁为主打卖点。同时拥有iAdapt2.0情景规划智能导航,基本路线规划上和Roomba处于一致的水平,配合北极星导航系统可以顺利的覆盖家里每一个角落,并精确的避开地毯、悬崖。
擦地在工作方式上更接近跪地手擦的手法,比扫拖一体更科学。  从2015年第一次看到开始,各种站内的文章十分种草,到现在算是一款老产品了,但导航确实简单有效,也一直有着较好的口碑,这可是从2014年开始的一直比较畅销的值得海淘的产品,干拖+湿拖双模式擦地。 在时间与口碑的双重检验下,干活效果不错,擦地也非常干净,算是一款非常成功的擦地机器人了。  Braava 380  Braava jet 240
对比起来Braava380更适合大户型使用,Brava jet 240适合小户型公寓使用,也对顽固污渍有着非常好的清洁效果。 比起扫拖一体机,这样的单独拖地更加专业,也没有诸多诟病,扫地与拖地分开实际使用效果上是会比扫拖一体好很多,而现在扫拖一体的设计思路趋势上也是单独的扫地与拖地模式避免同时进行。  9.9促销无意间看到970+380的组合价格比单买更低,这无疑………… 忍不住剁手了,早买早享受 使用评测到底有多享受,还是需要做做测试才知道。 开箱评测之前还是简短开个箱。
从外包装上可以看出Braava的体积稍小,970的左下角标了个手机标志,表示支持无线APP操作。
打开Roomba970,深蓝色外壳,只有三个按键:CLEAN(清洁)按钮、SPOT(定点清洁)按钮、DOCK(回充电桩)按钮。
Roomba970装箱配置。
Braava开箱。同样只有三个按键,电源,湿拖,干拖。
Braava 380装箱配置。
合影,设计上都采用了深色的配色,一大一小,一个扫地一个拖地的好搭档。
Virtual Wall双模式虚拟墙,虚拟墙分为两种方式,开关打到上部为线条形虚拟墙,开关打到下面为环形虚拟墙,可以根据需要设置隔离区域。
比较突出的是独创的可反向旋转的免缠绕的胶棒式清洁双主刷,优势在于降低了毛发缠绕的概率,同时在遇到线缆时可以反向旋转将线缆吐出,减少地形限制,这样的胶刷确实是个非常好的设计。 要知道清理米家扫地机器人的时候是需要剪刀来剪断丝丝缠绕在主刷上的头发的,同样情况也出现在戴森的吸尘器吸木地板的吸头上,剪刀清理的时候也要十分细致的避免剪断主刷的刷毛,清理工作非常之繁杂。
支持宽幅电压以及50/60Hz,全球通用,输出20.5V电压 1.25A电流,功率33W。
Braava 380的清洁垫与抹布分为干/湿两种,以应对不同的使用需求,值得称赞的是抹布的固定方式兼容常用的大部分抹布。通用抹布也只要三五元一块,后期耗材上并没有很大的开销。 开箱就暂且到这里,主要的还是测试过程。 对比测试针对上文里提到的小米的缺点以及iRobot视觉导航的优势,主要做下面几点的评测,同时加入小米做对比(竟不小心一下子拥有了三种导航系统)。来看看iRobot到底好在哪里。
1.导航系统对比测试 导航原理/功能 iRobot 970
不同于单纯依赖于vSLAM?一个导航系统的产品(例如戴森360eye),Roomba 970 扫地机器人搭载了三重传感系统:Wheel Odometry(轮胎里程计),Optical Float Sensor(光学移动传感器)以及vSLAM?视觉运算处理技术。 配上iAdapt2.0可视化全景规划导航的解决方案,比起其他系列是个质的飞跃,iRobot也终于开始路径规划了 Braava 380
Braava 380则实际上也是靠的iAdapt2.0来实现的导航规划,但是用上需要配合北极星导航系统的导航盒来实现更精确的覆盖。 米家扫地机器人
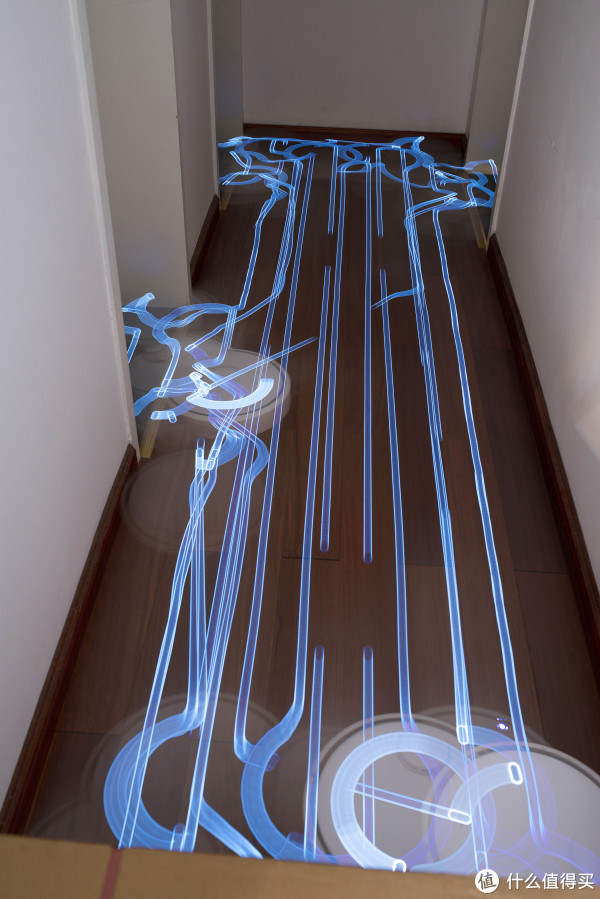
米家扫地机器人则主要是LDS激光距离传感器,就是上文所说的激光测距式导航系统。路径算法上是Z字形覆盖,简单有效。 vSALM和LDS的区别: iRobot的vSLAM? 视觉运算处理技术配备了先进的图像传感器,能够像人眼一样读取到具有细节的3D图像,让Roomba扫地机器人能够更加智能地识别周围环境。vSLAM是SLAM技术的一个分支,其中的”v”是视觉 (vision) 的意思,也是计算机视觉的一部分。具体来讲是指机器人在未知环境中,通过一个摄像头捕捉周围丰富的3D环境信息,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。 激光雷达技术(LDS)只能捕捉到周围环境一个切面信息,获取的信息也非常单一,没有太多细节,因而在被挪动之后很难重新定位。 看起来确实高大上,究竟怎样?实测才知道。 测试方法:同一块区域延时摄影记录行走轨迹。 我选择了家里相对比较规整的区域进行测试,但也每个门口都有门槛石,门槛石前有门压条等障碍物,稍微有点复杂度,但总体比较简单,测试清扫覆盖面积。
iRobot Roomba 970
轨迹上 Roomba 970 分三种轻扫模式,分模式进行了三次测试,轨迹图如上。
Braava 380 也有两种模式,湿拖与干拖模式,轨迹图如上。
米家扫地机器人,只有一种模式,轨迹上与Roomba 970的单独一次清扫模式及Braava380干拖模式差不多。 iRobot Roomba 970走出了新高度,两次清扫模式下井字形轨迹以及细致的边沿的清扫全在覆盖的情况下还交错着扫地,在边角位置会进行螺旋式的转体清扫,提高清洁效果。 Braava 380的表现也不错,比较有特色的是湿拖模式下的人字形轨迹,往复的擦洗动作,确实如人手一般的效果,只是你不在需要跪地了,而干擦模式在边角区域会进行旋转操作。看似没有眼睛完全靠碰撞来导航的Braava380在北斗的指引下也行走的非常规整。 米家扫地机器人也有不错的表现,不过只能与Roomba970的“一次清洁”模式类似,边角没有很好的照顾,行为上更像机器人,执行死指令。 2.清洁效果测试
根据Roomba960的资料,Roomba970应该也是使用的日产电机NIDEC 20N无刷数字电机,在12V下提供1300帕左右的风压(数据来源于电机制造商)。
而我拆开看Roomba970 的电池,根据DC14.4V输出电压判断,额定电压下最大风压应该在1600帕左右,而5倍劲吸的增压加大功率模式下具体到多少就不得而知了,但就算只只翻两倍都是吓人的效果,针对木地板的缝隙里的灰尘及过敏原会有比较好的清洁效果。 米家的风压根据工作模式的不同在800帕-1600帕之间,而擦地机器人工作方式不同也没有可比性。 由于有5倍劲吸模式的作弊般的存在,所以这里先单独测试Roomba970对不同类型的垃圾进行清扫的对比,测试下清洁能力。 清扫测试物品:
四种从粉末到颗粒到块状,大小不一,均匀的洒在木地板上,来看看具体清扫情况如何。
下面开始测试。
面粉清扫测试,面粉还是比较难清扫的,可以看到的是在探测到有污渍的时候iRobot970开始重点清扫模式,往复多次覆盖了污渍区域,也开启了5倍吸力,增加清扫力度。 虽然清扫掉了98%以上的面粉,但还是有薄薄得一层粘得太紧几次覆盖都没有能清理掉,但是别忘了还有一道擦地工序,再用Braava 380来湿擦+干擦一遍就非常干净了,媲美人工清扫。
面包糠颗粒比较大,清扫起来更干净,但也触发了污垢探测模式,有往复清扫的行为。
黄豆主要的问题是圆形易滚动,而且圆形的外形不利于吸尘器吸入,但也很好的完成了任务。
大小不一的花生壳也比较容易清扫,对于大颗粒固体垃圾而言是非常有效的。
但我疏忽了一点,我开的两次模式,没有开细致的边沿清扫。而自动模式的描述上是智能选择清洁模式,既然有智能模式加成,我觉得还是打开自动模式和小米对比下更加直观。 智能清扫效果对比测试 经过上面的测试,看来面粉这样的细微粉尘是比较难清除的对象,所以再对比测试一次面粉的清扫。
小米开的强力模式,清扫上还是全覆盖了,但是面粉会被推进木地板的缝隙里,缝隙里的面粉就比较难清扫了,可以看到清扫范围内缝隙都是填满了面粉,形成了一条条的白线,表面残留的面灰也比较多,主要原因是行走轮粘带了粉尘,以及边刷把粉尘抹均匀了,填进了木地板缝隙。 这看起来没很高的智能程度,只是机械式的覆盖清扫一遍。
这次开启了自动模式,可以看到明显的改变是自动模式下清扫了多次,而且也在污渍区域往复清扫了几遍。看得出确实有智能识别污垢并加强清扫的行为改变。
再来看看清扫后的缝隙,虽然还是有残留,但不是填满的状态了,中间有黑色缝隙,可以推断至少是能吸出缝隙里的一部分灰尘。而且对于木地板这样有纹路的地面,井字形的覆盖也能在一定程度上增加洁净程度。
原来是这样的黑科技,可以识别污垢和垃圾,自动进行重点清洁。
这是面粉测试的工作历史记录报告,对于污垢的探测上是非常灵敏的,即使面粉这样的细小的附着在表面薄薄一层的污垢也能识别出来(地图上的十字标记为污垢标记),光波+声波的识别率还是非常高的,这又让我想起了火星车。。不得不膜拜一把iRobot了。。
再付送个Braava380的擦地动图,可以很直观的看下仿人工跪式擦地的工作状态。可以擦掉之前测试地板表面残留的面粉,但是缝隙里的少量面粉实在擦不掉。 缝隙里的连我自己人工也难清理掉,有点后悔做这个测试了…… 日常情况下这样大量的粉尘堆积还是比较少的,当然平时也要多除尘才能防止木地板缝隙里积灰。 3.悬崖探测测试 跌落测试,主要测试传感器的高效性,以及机器人的反应速度。 测试方法:置于椅子上打开工作模式,看机器人对悬崖的反应。
动图均为400%播放速度,可以看出效果都不错,对于这样的高度悬崖探测很灵敏。 但是实际使用过程中,我遇到过很多次米家扫地机器人在很多的情况下跌落下悬崖的时候(悬崖不是很明显,悬崖不是很高但足以阻挡机器人会去,稍有坡度机器人顺势冲下去了。),概率还不低,而且遇到了悬崖+边角处时脱困十分困难,这是十分头疼的事情,而更加头疼的是改变位置后它会重新开始全房清扫,已经清扫的地区也会重新扫一遍,十分浪费时间。 而Roomba970在我最近的使用过程中并没有遇到跌下悬崖的情况,基本都是一次清扫搞定。 4.学习/记忆功能测试 但我想再测测意外停机换位置启动重新工作时的地图位置识别以及恢复清扫的状态。 只有这样才能证明机器人是真的画了个地图,有眼睛有思想才真的知道自己在哪,也能知道自己要到哪去。
我在那儿?要去哪儿?怎么去?这大概是扫地机器人的人生三大哲学问题了,它一生都在思考这三个问题,显然没有个强大的分析处理系统时很难想明白的。 测试方法:用小米和Roomba970分别清扫相同的空间,清扫过程中将机器人拿起运送至曾经清扫过的地方放下继续清扫。
清扫空间为客厅+餐厅,为了显得有记忆,我特意将两个扫机器人的充电座放在比较隐蔽的位置,有拐角及遮挡,较远处不能“看见”。
移动的距离如图,从餐厅移至客厅,大概5米的距离。从探索区间移至已清扫区域,看是否有记忆。 接下来就看各自的表现了。
两台机器人都是大概清扫在同一位置处拾起,再放到相同的清扫过的位置。
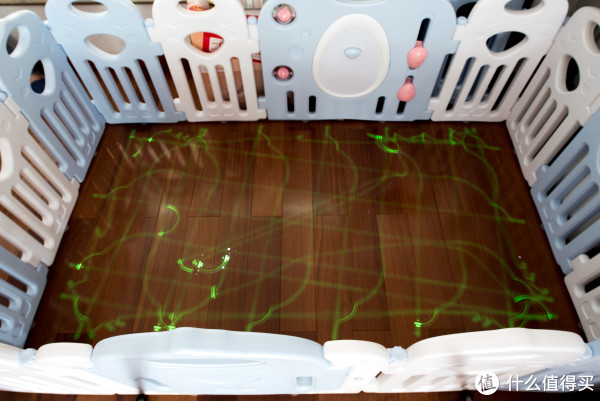
米家扫地机器人很明显地图发生了变化,往回移动之后把清扫过的空间识别为了新的未清扫空间,并重新规划清扫了一遍。在回充电座的过程中非常曲折。。
Roomba970地图未发生变化,能识别出自己所处的位置,没有重复清扫所在区域,能顺利返回充电座。 二者对比起来很明显米家扫地机器人并不知道自己在哪,不知道自己去过哪,只知道自己要干什么,这次能回充电座是碰运气路过了(扫完返回并没有直接往充电座走对着墙角撞了七八分钟),如果距离再稍微远一点(比如有拐角)一般都是回不去的。 实测确实如此,具有vSLAM视觉运算处理技术的Roomba970从某种意义上确实是能看见了,能记住了。对于生物而言看得见和记得住是最基本的是生存条件,但是对于机器人而言这是前进的一大步,视觉的重要性不用多说,生物90%的信息量来自于视觉,视觉信息量更大更复杂。显然激光导航模式因为信息量有限,所以才不能做出正确的判断。 而且这样的学习记忆技能在多次清扫后会进行优化结合污点探测功能,全屋清扫进行四次之后达到最佳状态,可以极大的提升清扫速度。 我不禁好奇那没有眼睛怎么办?蒙上眼睛岂不都是失效了,不能扫地了?天气不好也扫不了地了? 那再来测测挡住摄像头是什么结果。
所谓“眼睛”是一枚摄像头,位于扫地机器人顶部,但这视角应该是看的墙壁天花板和高一点的家具,可能识别方式上是将实物转为线图,再运动中不停采集画面3D建模从而达到“看得见”的效果。这个技术应该类似火星车的识别技术。
正常情况下的行走路线。
下面把眼睛蒙上再相同模式清扫一次。
并没有什么大区别,看来视觉带来的是增加记忆力和认知力,基本的导航与路径规划只需要iAdapt2.0就可以胜任,全天候作战并无压力,蒙眼后只是不能做下次清扫的优化计算了。 为了学习和记忆为清扫做优化竟然做了个vSLAM视觉运算处理系统,只是减少清扫的失败率和提高清扫效率,这样的极致追求恐怕只有纯粹的计算机算法科学家才愿意这样不断的精益求精吧。 6.噪音测试 噪音上倒是没什么对比性,主要是吸尘器的声音,运行起来都一样大。
实际上噪音是差不多的,米家扫地机器人在角落处发出的噪音经反射更集中带来了一点差别。 噪音倒不是评价扫地机机器人的主要因素,因为大部分家庭在使用的时候都是离家状态,相较而言智能和省心更重要。 7.越障/躲避障碍测试 越障能力米家扫地机器人官方标注为1.5cm,iRobot Roomba970为2cm,就不对比测试了,我没有正好2cm的物体,即使证明了Roomba 970能翻越2cm也意义不大,毕竟数据已经摆在这里了。 在这里我更想看看防绳/数据线缠绕能力。 测试方法:用三种不同类类型的绳子/数据线绑在椅子脚上进行测试
测试椅子底部的数据线、粗绳、电源线的障碍脱困及通过情况。这三种也是家中常见的障碍物。 米家扫地机器人测试
障碍物为堆叠在一起的杂乱线团。
米家扫地机器人卷走了粗绳,还拖动了椅子,最后绳子卡在主刷和轮子处才故障停机。如果不是绳结散开了估计会拖着椅子继续完成工作。这非常危险,很严重的安全隐患(比如把桌上的物品扯下来),米家扫地机器人并不知道自己处于什么样的状态,不能识别受阻/被困,依然在执行死命令。
将机器反过来查看缠绕情况,这种粗绳其实应该很难卷进去,但是仍然卷进了主刷,我在清除过程中只是稍微一拉就能扯掉卡得并不十分死,但是只能往一个方向转动的主刷并不能脱困。 下面是Roomba 970 的测试。
同样设置的杂乱线团。
测试过程中确实被缠绕困住了一小会儿,但是几秒就脱困了。
仔细看看发了什么,越过障碍的时候主刷被卡住了,边刷也受到了阻碍,但是机器人识别出了被困并反转吐出了缠绕物,主刷与边刷也暂停工作了一小会儿,成功摆脱困境。
确实如官方宣传的防缠绕一样起了作用,双胶刷的设计也在很大程度上减少了缠绕水平。 不过话说回来……人家有能在火星脱困的技术,这点小障碍算不了什么。 我这理工毕业的除了膜拜iRobot,就只剩嫉妒了。 据称iAdapt2.0导航系统升级到2.0之后经过这么多年的实战已经能应对几万种复杂情况了,这就像个极具智慧的老司机,而米家扫地机器人比起来只是个新手。 说到胶刷再来看看使用几天后的毛发缠绕情况。 使用条件说明:家里有三个长发女性,长发对于吸尘器和扫地机器人而言,绝对是谋杀主刷的杀手,缠绕过多的头发不但会使清洁效果大打折扣,也会卡在转轴处进一步卡死主刷。
清扫后胶刷上杂物非常多,也有少量头发。
拆下来看并没有缠绕很紧的情况,算是正常的沾染水平。
由于没有毛刷,清理起来很方便,基本上取下抖两下就没有了。
尘盒入口处竟然还有笔芯这样的大件。
尘盒内的大量头发可以判断出长发大多数可以顺利的从胶刷吸入尘盒,而不是缠绕在主刷上,这也是胶 |


 清扫成功次数寥寥
清扫成功次数寥寥
 我家的伏地魔
我家的伏地魔
 ,一步到位不再纠结。
,一步到位不再纠结。 路径规划导航模式VS随机模式
路径规划导航模式VS随机模式



 。
。 戴森360eye 清扫路径
戴森360eye 清扫路径












 Roomba970充电座
Roomba970充电座 Braava380 湿/干清洁垫+抹布
Braava380 湿/干清洁垫+抹布





 3300mAh电池续航120分钟
3300mAh电池续航120分钟
 面粉清扫测试
面粉清扫测试 面包糠清扫测试
面包糠清扫测试 黄豆清扫测试
黄豆清扫测试 花生壳清扫测试
花生壳清扫测试
 米家扫地机器人面粉清扫测试
米家扫地机器人面粉清扫测试 Roomba 970 面粉清扫测试
Roomba 970 面粉清扫测试 清扫后缝隙积灰特写
清扫后缝隙积灰特写
 Braava 380擦地
Braava 380擦地
 Roomba 970
Roomba 970 米家扫地机器人
米家扫地机器人

 机器人识别的清扫空间
机器人识别的清扫空间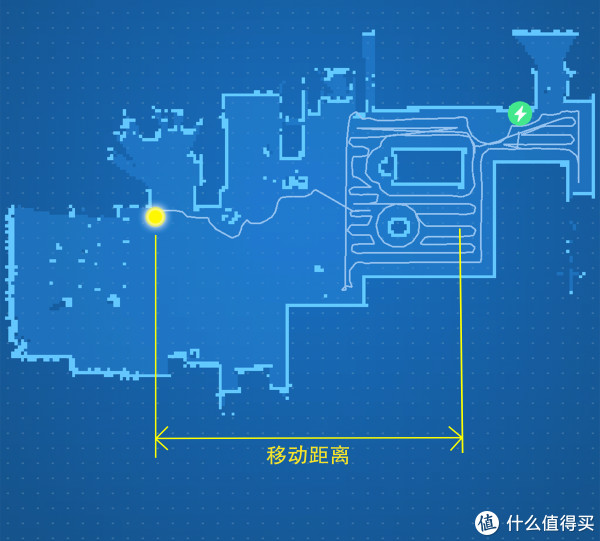
 米家扫地机器人移动过程
米家扫地机器人移动过程 Roomba 970移动过程
Roomba 970移动过程

 Roomba970“眼睛”特写
Roomba970“眼睛”特写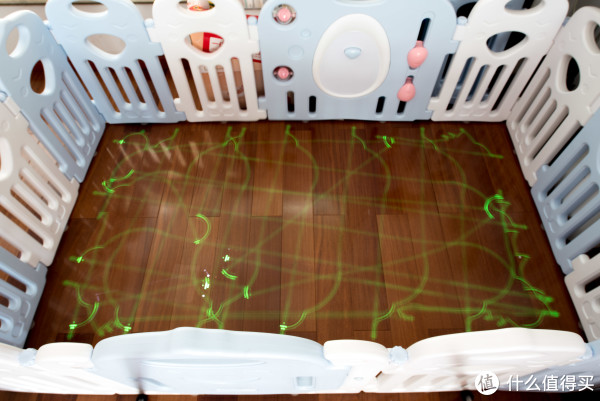 睁眼清扫
睁眼清扫
 蒙眼清扫
蒙眼清扫 米家扫地机器人噪音
米家扫地机器人噪音 Roomba 970噪音
Roomba 970噪音 测试场景
测试场景 障碍物设计
障碍物设计 米家扫地机机器人障碍缠绕测试
米家扫地机机器人障碍缠绕测试 米家扫地机器人被粗绳锁死
米家扫地机器人被粗绳锁死 iRobot Roomba 970障碍设置
iRobot Roomba 970障碍设置

 清扫后的胶刷特写
清扫后的胶刷特写








 我也要投稿
我也要投稿









香港服务器多少钱一个月?哪家的香港服务器
4核4g6M50G盘20G防御云服务器价格多少钱?T
特发集团与华为签署全面合作协议
【身边的AI】高空抛物智能追溯解决方案,站
中海&华为签署战略深化合作协议
华为赵博:数字化转型成为地产企业最确定的
这款TCL K6V指纹锁不到千元即可买到?大品
凯迪仕指纹锁哪款好用?买凯迪仕指纹锁选哪
极光尔沃3d打印机怎么样?极光尔沃a6详细介
企业上云对企业有什么帮助?企业上云有哪些